Funcionamiento del Puente H
Introducción

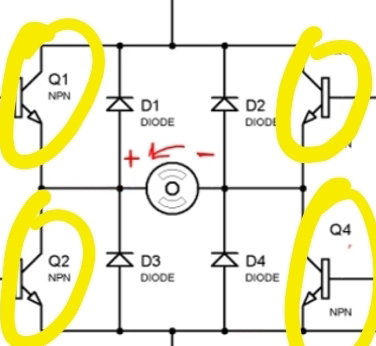
El circuito mostrado es un puente H, un sistema ampliamente utilizado en electrónica para controlar motores de corriente continua (DC). Este circuito permite invertir la polaridad aplicada al motor, lo que a su vez cambia su dirección de giro. Además, también permite encender o apagar el motor sin necesidad de desconectar físicamente la fuente de alimentación.
Descripción Técnica
El puente H consta de cuatro transistores (Q1, Q2, Q3 y Q4),
 ||||||||||||||||
||||||||||||||||Cada componente cumple una función específica en el control del motor de DC conectado en el centro del puente.
Componentes y su Función
Transistores (Q1, Q2, Q3, Q4)
Los transistores utilizados son del tipo
NPN y actúan como interruptores electrónicos. Cuando un pin digital del
microcontrolador (Arduino, en este caso) activa la base de un transistor, este
permite el paso de corriente desde el colector hacia el emisor. Esto hace que
el motor reciba corriente en la dirección deseada.
La combinación de transistores que se activa determina la dirección de giro del
motor:
- Si Q1 y Q4 están encendidos, el motor gira en un sentido.

- Si Q2 y Q3 están encendidos, el motor gira en sentido contrario.

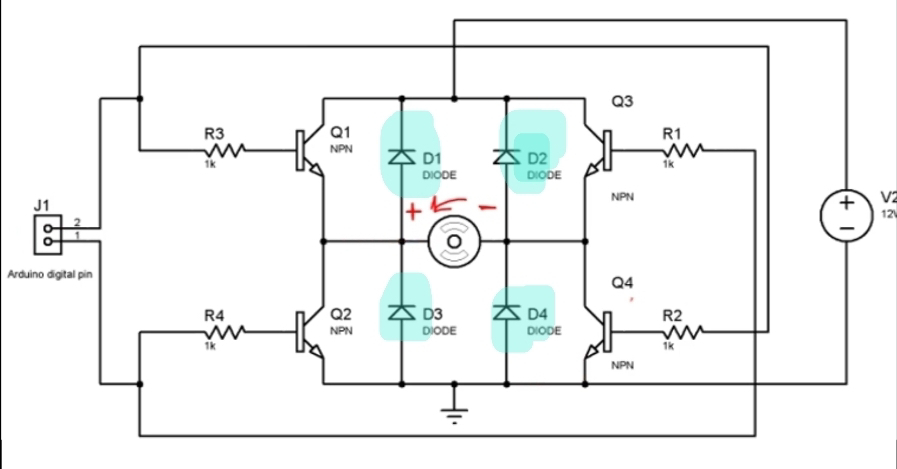
Diodos (D1, D2, D3, D4)
Los diodos están conectados en paralelo con los transistores y cumplen la función de protección. Cuando el motor cambia de dirección o se detiene, genera un voltaje inverso debido a su inercia. Este fenómeno, conocido como fuerza contraelectromotriz, podría dañar los transistores. Los diodos permiten que esta corriente inversa fluya de manera segura, protegiendo el circuito.
Resistencias (R1, R2, R3, R4)
Las resistencias conectadas a las bases de los transistores limitan la corriente que fluye hacia estas, evitando daños en los transistores y en el microcontrolador. Además, aseguran un funcionamiento estable al evitar activaciones accidentales por ruido eléctrico.
Funcionamiento del Circuito
1. **Motor en reposo**: Si todos los
transistores están apagados, no fluye corriente hacia el motor y este permanece
detenido.
2. **Giro en un sentido**: Cuando Q1 y Q4 están activados, la corriente fluye
desde la fuente de alimentación (+) a través de Q1, el motor, y finalmente a
tierra a través de Q4. Esto genera un campo magnético que hace girar el motor
en una dirección específica.

3. **Giro en sentido contrario**: Cuando Q2 y Q3 están activados, la corriente fluye en sentido opuesto: desde la fuente de alimentación (+) a través de Q3, el motor, y finalmente a tierra a través de Q2. Esto invierte el campo magnético, cambiando la dirección de giro del motor.

4. **Protección**: Los diodos se activan automáticamente si se genera una corriente inversa por la inercia del motor, protegiendo el circuito.

Conclusión
El puente H es un circuito esencial en el control de motores de corriente continua, permitiendo cambiar su dirección de giro de manera eficiente y segura. Los transistores actúan como interruptores controlados por el microcontrolador, mientras que los diodos y resistencias aseguran la protección y estabilidad del sistema. Este diseño es ideal para aplicaciones de robótica y automatización.
1 EJERCICIO DE SIMULACION PUENTE H CON TRANSISTORES:
SIMULAR EL SIGUIENTE CIRCUITO EN TINKERCAD ( PUENTE H CON TRANSISTORES )
2 EJERCICIO DE SIMULACION PUENTE H CON ARDUINO E INTEGRADO L293D:
SIMULAR EL SIGUIENTE CIRCUITO EN TINKERCAD ( PUENTE H CON INTEGRADO L293D
3 EJERCICIO DE SIMULACION PUENTE H CON ARDUINO E INTEGRADO L293D CON BOTON Y COMANDO IF ELSE):
SIMULAR UN CIRCUITO SIMILAR AL DEL EJERCICIO 2 Y QUE SE ACTIVE CON UN PULSADOR USANDO LOS COMANDOS IF ELSE.



No hay comentarios:
Publicar un comentario